前言
老习惯点个题,最近也是比较忙了,很多事情闲了,有时间瞎搞自己组了基于can的温湿度显示其实是比较
简单的,也很简陋因为本人还是比较偏软件类的,这个也是一直兴起,代码和硬件本身还是存在很多问题的,
欢迎大家来讨论,共同进步。
项目分析
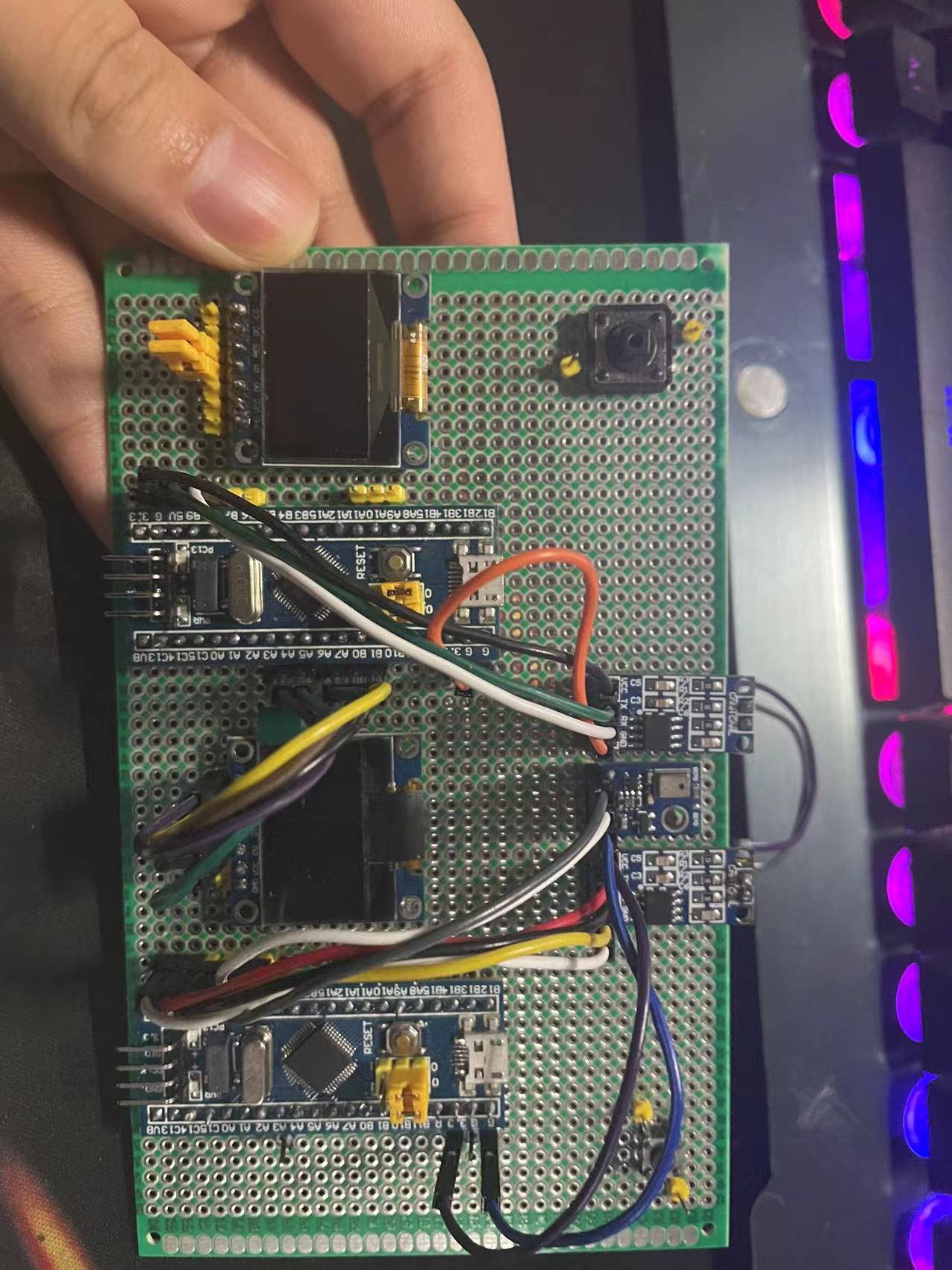
简单的说一下组成吧,由两片stm32f103c8 和 两片tja1050 一个7pin的oled显示屏,和一片aht10组成
当然还有若干杜邦线,代码的话分为温湿度端,和oled端,当然字如其名,温湿度端实现了温湿度的检测和发
送到oled端,由bsp_can.c和bsp_i2c.c组成;oled端的话是显示温湿度,由oled.c和can.c组成,目前代码
还是存在一点小bug的就是显示温湿度小数点以后的数字是没办法显示的,本人也是暂时没有弄了,等闲了在改
如果你有好的方法欢迎指导我一下,感谢了!
说一下硬件吧tja1050的TX接PB8,TX接PB9(由于我这个板子PB8,BP9是复用引脚所以你一定要用GPIO_PinR
emapConfig 函数把 CAN 映射至 PB8、PB9),VCC是需要5v供电的,GND自然接GND着没的说,aht10的VIN接
3.3,GND接GND,SCL接PB6,SDA接PB7 ,还有就是stm32供电的问题,个人建议不要用电脑供电因为之前我电脑
供电一直无法实现通信,电脑供电大概率是因为供电不足吧所以,个人建议你用充电器供电稳妥一点。
关于can通信我是建议你先用回环测试,如果回环测试成功再进行下一步,不过你要注意的是我使用的stm32
是自带can协议的,也就是说不需要tja1050也是可以实现回环的,回环只是逻辑上的相同,实现can的自循环,所
以当你can回环可用的时候在外接tja1050就可以实现接受数据了的,使用can分析仪的时候H接CAN_H,L接CAN_L,
就没有问题了,当然你是要注意波特率的,每个板子的波特率都是不同的,所以你需要自己查询文档,我的板子的
话 HSE时钟:8MHz ,由于我用的是PLL输入时钟源所以我的can工作时钟是36HZ(这些我相信百度你会找到答案的)
当然我给你个公式 晶振 x PLL倍频 / APB1分频 / 60 / (1 + 3 + 2) = 0.1 = 100 (K)(结果只是例子你需
要自己根据自身情况来解决),所以我的can的通信波特率是 100 K。
温湿度端
bsp_i2c.c
#include "./bsp_i2c/bsp_i2c.h"
#include "./delay/delay.h"
uint8_t ack_status=0;
uint8_t readByte[6];
uint8_t aht10_status=0;
uint32_t H1=0; //Humility
uint32_t T1=0; //Temperature
uint8_t AHT10_OutData[4];
uint8_t AHT10sendOutData[10] = {0xFA, 0x06, 0x0A, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0xFF};
float AdcData[4][20];
u8 TempMeasure_Flag;//温度测试次数标志
float AveId[4];//数据测量次数,最多20
float AdcData_Temp[20];//承接温度的中间数据
float AdcData_Humi[20];//承接湿度的中间数据
/******************
*以下为IO口模块I2C配置
******************/
/*
20个数据循环左移1
*/
void ZuoYi(float *arr){
int i;
for(i=0;i<19;i++){
arr[i]=arr[i+1];
}
}
//将数组arr2的20个数据给数组arr1;
void JiaoHuan(float *arr1,float *arr2) {
int i;
for(i=0;i<20;i++){
arr1[i]= arr2[i];
}
}
void IIC_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOB, ENABLE );
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6|GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP ; //推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
IIC_SCL=1;
IIC_SDA=1;
}
//产生IIC起始信号
void IIC_Start(void)
{
SDA_OUT(); //sda线输出
IIC_SDA=1;
IIC_SCL=1;
delay_us(4);
IIC_SDA=0;//START:when CLK is high,DATA change form high to low
delay_us(4);
IIC_SCL=0;//钳住I2C总线,准备发送或接收数据
}
//产生IIC停止信号
void IIC_Stop(void)
{
SDA_OUT();//sda线输出
IIC_SCL=0;
IIC_SDA=0;//STOP:when CLK is high DATA change form low to high
delay_us(4);
IIC_SCL=1;
IIC_SDA=1;//发送I2C总线结束信号
delay_us(4);
}
//等待应答信号到来
//返回值:1,接收应答失败
// 0,接收应答成功
u8 IIC_Wait_Ack(void)
{
u8 ucErrTime=0;
SDA_IN(); //SDA设置为输入
IIC_SDA=1;delay_us(1);
IIC_SCL=1;delay_us(1);
while(READ_SDA)
{
ucErrTime++;
if(ucErrTime>250)
{
IIC_Stop();
return 1;
}
}
IIC_SCL=0;//时钟输出0
return 0;
}
//产生ACK应答
void IIC_Ack(void)
{
IIC_SCL=0;
SDA_OUT();
IIC_SDA=0;
delay_us(2);
IIC_SCL=1;
delay_us(2);
IIC_SCL=0;
}
//不产生ACK应答
void IIC_NAck(void)
{
IIC_SCL=0;
SDA_OUT();
IIC_SDA=1;
delay_us(2);
IIC_SCL=1;
delay_us(2);
IIC_SCL=0;
}
//IIC发送一个字节
//返回从机有无应答
//1,有应答
//0,无应答
void IIC_Send_Byte(u8 txd)
{
u8 t;
SDA_OUT();
IIC_SCL=0;//拉低时钟开始数据传输
for(t=0;t<8;t++)
{
IIC_SDA=(txd&0x80)>>7;
txd<<=1;
delay_us(2); //对TEA5767这三个延时都是必须的
IIC_SCL=1;
delay_us(2);
IIC_SCL=0;
delay_us(2);
}
}
//读1个字节,ack=1时,发送ACK,ack=0,发送nACK
u8 IIC_Read_Byte(unsigned char ack)
{
unsigned char i,receive=0;
SDA_IN();//SDA设置为输入
for(i=0;i<8;i++ )
{
IIC_SCL=0;
delay_us(2);
IIC_SCL=1;
receive<<=1;
if(READ_SDA)receive++;
delay_us(1);
}
if (!ack)
IIC_NAck();//发送nACK
else
IIC_Ack(); //发送ACK
return receive;
}
void IIC_WriteByte(uint16_t addr,uint8_t data,uint8_t device_addr)
{
IIC_Start();
if(device_addr==0xA0) //eeprom地址大于1字节
IIC_Send_Byte(0xA0 + ((addr/256)<<1));//发送高地址
else
IIC_Send_Byte(device_addr); //发器件地址
IIC_Wait_Ack();
IIC_Send_Byte(addr&0xFF); //发送低地址
IIC_Wait_Ack();
IIC_Send_Byte(data); //发送字节
IIC_Wait_Ack();
IIC_Stop();//产生一个停止条件
if(device_addr==0xA0) //
delay_ms(10);
else
delay_us(2);
}
uint16_t IIC_ReadByte(uint16_t addr,uint8_t device_addr,uint8_t ByteNumToRead) //读寄存器或读数据
{
uint16_t data;
IIC_Start();
if(device_addr==0xA0)
IIC_Send_Byte(0xA0 + ((addr/256)<<1));
else
IIC_Send_Byte(device_addr);
IIC_Wait_Ack();
IIC_Send_Byte(addr&0xFF); //发送低地址
IIC_Wait_Ack();
IIC_Start();
IIC_Send_Byte(device_addr+1); //发器件地址
IIC_Wait_Ack();
if(ByteNumToRead == 1)//LM75温度数据为11bit
{
data=IIC_Read_Byte(0);
}
else
{
data=IIC_Read_Byte(1);
data=(data<<8)+IIC_Read_Byte(0);
}
IIC_Stop();//产生一个停止条件
return data;
}
/**********
*以下为AHT10的配置I2C
*函数名有IIC和I2C的不同
***********/
void read_AHT10_once(void)
{
delay_ms(10);
reset_AHT10();
delay_ms(10);
init_AHT10();
delay_ms(10);
startMeasure_AHT10();
delay_ms(80);
read_AHT10();
delay_ms(5);
}
void reset_AHT10(void)
{
I2C_Start();
I2C_WriteByte(0x70);
ack_status = Receive_ACK();
if(ack_status) printf("1");
else printf("1-n-");
I2C_WriteByte(0xBA);
ack_status = Receive_ACK();
if(ack_status) printf("2");
else printf("2-n-");
I2C_Stop();
/*
AHT10_OutData[0] = 0;
AHT10_OutData[1] = 0;
AHT10_OutData[2] = 0;
AHT10_OutData[3] = 0;
*/
}
void init_AHT10(void)
{
I2C_Start();
I2C_WriteByte(0x70);
ack_status = Receive_ACK();
if(ack_status) printf("3");
else printf("3-n-");
I2C_WriteByte(0xE1);
ack_status = Receive_ACK();
if(ack_status) printf("4");
else printf("4-n-");
I2C_WriteByte(0x08);
ack_status = Receive_ACK();
if(ack_status) printf("5");
else printf("5-n-");
I2C_WriteByte(0x00);
ack_status = Receive_ACK();
if(ack_status) printf("6");
else printf("6-n-");
I2C_Stop();
}
void startMeasure_AHT10(void)
{
//------------
I2C_Start();
I2C_WriteByte(0x70);
ack_status = Receive_ACK();
if(ack_status) printf("7");
else printf("7-n-");
I2C_WriteByte(0xAC);
ack_status = Receive_ACK();
if(ack_status) printf("8");
else printf("8-n-");
I2C_WriteByte(0x33);
ack_status = Receive_ACK();
if(ack_status) printf("9");
else printf("9-n-");
I2C_WriteByte(0x00);
ack_status = Receive_ACK();
if(ack_status) printf("10");
else printf("10-n-");
I2C_Stop();
}
void read_AHT10(void)
{
uint8_t i;
u8 dataid;
for(i=0; i<6; i++)
{
readByte[i]=0;
}
//-------------
I2C_Start();
I2C_WriteByte(0x71);
ack_status = Receive_ACK();
if(ack_status) printf("11");
else printf("11-n-");
readByte[0]= I2C_ReadByte();
printf("test0:%d",readByte[0]);
Send_ACK();
readByte[1]= I2C_ReadByte();
printf("test1:%d",readByte[1]);
Send_ACK();
readByte[2]= I2C_ReadByte();
printf("test2:%d",readByte[2]);
Send_ACK();
readByte[3]= I2C_ReadByte();
printf("test3:%d",readByte[3]);
Send_ACK();
readByte[4]= I2C_ReadByte();
printf("test4:%d",readByte[4]);
Send_ACK();
readByte[5]= I2C_ReadByte();
printf("test5:%d",readByte[5]);
SendNot_Ack();
//Send_ACK();
I2C_Stop();
//--------------
if( (readByte[0] & 0x68) == 0x08 )
{
H1 = readByte[1];
H1 = (H1<<8) | readByte[2];
H1 = (H1<<8) | readByte[3];
H1 = H1>>4;
H1 = (H1*1000)/1024/1024;
T1 = readByte[3];
T1 = T1 & 0x0000000F;
T1 = (T1<<8) | readByte[4];
T1 = (T1<<8) | readByte[5];
T1 = (T1*2000)/1024/1024 - 500;
AHT10_OutData[0] = (H1>>8) & 0x000000FF;
AHT10_OutData[1] = H1 & 0x000000FF;
AHT10_OutData[2] = (T1>>8) & 0x000000FF;
AHT10_OutData[3] = T1 & 0x000000FF;
printf("成功了");
}
else
{
AHT10_OutData[0] = 0xFF;
AHT10_OutData[1] = 0xFF;
AHT10_OutData[2] = 0xFF;
AHT10_OutData[3] = 0xFF;
printf("失败了");
}
}
uint8_t Receive_ACK(void)
{
uint8_t result=0;
uint8_t cnt=0;
IIC_SCL = 0;
SDA_IN();
delay_us(4);
IIC_SCL = 1;
delay_us(4);
while(READ_SDA && (cnt<100))
{
cnt++;
}
IIC_SCL = 0;
delay_us(4);
if(cnt<100)
{
result=1;
}
return result;
}
void Send_ACK(void)
{
SDA_OUT();
IIC_SCL = 0;
delay_us(4);
IIC_SDA = 0;
delay_us(4);
IIC_SCL = 1;
delay_us(4);
IIC_SCL = 0;
delay_us(4);
SDA_IN();
}
void SendNot_Ack(void)
{
SDA_OUT();
IIC_SCL = 0;
delay_us(4);
IIC_SDA = 1;
delay_us(4);
IIC_SCL = 1;
delay_us(4);
IIC_SCL = 0;
delay_us(4);
IIC_SDA = 0;
delay_us(4);
}
void I2C_WriteByte(uint8_t input)
{
uint8_t i;
SDA_OUT();
for(i=0; i<8; i++)
{
IIC_SCL = 0;
delay_ms(5);
if(input & 0x80)
{
IIC_SDA = 1;
//delaymm(10);
}
else
{
IIC_SDA = 0;
//delaymm(10);
}
IIC_SCL = 1;
delay_ms(5);
input = (input<<1);
}
IIC_SCL = 0;
delay_us(4);
SDA_IN();
delay_us(4);
}
uint8_t I2C_ReadByte(void)
{
uint8_t resultByte=0;
uint8_t i=0, a=0;
IIC_SCL = 0;
SDA_IN();
delay_ms(4);
for(i=0; i<8; i++)
{
IIC_SCL = 1;
delay_ms(3);
a=0;
if(READ_SDA)
{
a=1;
}
else
{
a=0;
}
//resultByte = resultByte | a;
resultByte = (resultByte << 1) | a;
IIC_SCL = 0;
delay_ms(3);
}
SDA_IN();
delay_ms(10);
return resultByte;
}
void set_AHT10sendOutData(void)
{
/* --------------------------
* 0xFA 0x06 0x0A temperature(2 Bytes) humility(2Bytes) short Address(2 Bytes)
* And Check (1 byte)
* -------------------------*/
AHT10sendOutData[3] = AHT10_OutData[0];
AHT10sendOutData[4] = AHT10_OutData[1];
AHT10sendOutData[5] = AHT10_OutData[2];
AHT10sendOutData[6] = AHT10_OutData[3];
}
void I2C_Start(void)
{
SDA_OUT();
IIC_SCL = 1;
delay_ms(4);
IIC_SDA = 1;
delay_ms(4);
IIC_SDA = 0;
delay_ms(4);
IIC_SCL = 0;
delay_ms(4);
}
void I2C_Stop(void)
{
SDA_OUT();
IIC_SDA = 0;
delay_ms(4);
IIC_SCL = 1;
delay_ms(4);
IIC_SDA = 1;
delay_ms(4);
}
bsp_can.c
#include "./can/bsp_can.h"
#include "./delay/delay.h"
/*
* 函数名:CAN_GPIO_Config
* 描述 :CAN的GPIO 配置
* 输入 :无
* 输出 : 无
* 调用 :内部调用
*/
static void CAN_GPIO_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
/* Enable GPIO clock */
RCC_APB2PeriphClockCmd(CAN_TX_GPIO_CLK|CAN_RX_GPIO_CLK, ENABLE);
//重映射引脚
GPIO_PinRemapConfig(GPIO_Remap1_CAN1, ENABLE);
/* Configure CAN TX pins */
GPIO_InitStructure.GPIO_Pin = CAN_TX_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; // 复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(CAN_TX_GPIO_PORT, &GPIO_InitStructure);
/* Configure CAN RX pins */
GPIO_InitStructure.GPIO_Pin = CAN_RX_PIN ;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; // 上拉输入
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(CAN_RX_GPIO_PORT, &GPIO_InitStructure);
}
/*
* 函数名:CAN_NVIC_Config
* 描述 :CAN的NVIC 配置,第1优先级组,0,0优先级
* 输入 :无
* 输出 : 无
* 调用 :内部调用
*/
static void CAN_NVIC_Config(void)
{
NVIC_InitTypeDef NVIC_InitStructure;
/* Configure one bit for preemption priority */
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_1);
/*中断设置*/
NVIC_InitStructure.NVIC_IRQChannel = CAN_RX_IRQ; //CAN1 RX0中断
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; //抢占优先级0
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; //子优先级为0
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
/*
* 函数名:CAN_Mode_Config
* 描述 :CAN的模式 配置
* 输入 :无
* 输出 : 无
* 调用 :内部调用
*/
static void CAN_Mode_Config(void)
{
CAN_InitTypeDef CAN_InitStructure;
/************************CAN通信参数设置**********************************/
/* Enable CAN clock */
RCC_APB1PeriphClockCmd(CAN_CLK, ENABLE);
/*CAN寄存器初始化*/
CAN_DeInit(CANx);
CAN_StructInit(&CAN_InitStructure);
/*CAN单元初始化*/
CAN_InitStructure.CAN_TTCM=DISABLE; //MCR-TTCM 关闭时间触发通信模式使能
CAN_InitStructure.CAN_ABOM=ENABLE; //MCR-ABOM 自动离线管理
CAN_InitStructure.CAN_AWUM=ENABLE; //MCR-AWUM 使用自动唤醒模式
CAN_InitStructure.CAN_NART=DISABLE; //MCR-NART 禁止报文自动重传 DISABLE-自动重传
CAN_InitStructure.CAN_RFLM=DISABLE; //MCR-RFLM 接收FIFO 锁定模式 DISABLE-溢出时新报文会覆盖原有报文
CAN_InitStructure.CAN_TXFP=DISABLE; //MCR-TXFP 发送FIFO优先级 DISABLE-优先级取决于报文标示符
CAN_InitStructure.CAN_Mode = CAN_Mode_Normal; //正常工作模式
CAN_InitStructure.CAN_SJW=CAN_SJW_1tq;
CAN_InitStructure.CAN_BS1=CAN_BS1_3tq;
CAN_InitStructure.CAN_BS2=CAN_BS2_2tq;
CAN_InitStructure.CAN_Prescaler=60;
//CAN_InitStructure.CAN_SJW=CAN_SJW_2tq; //BTR-SJW 重新同步跳跃宽度 2个时间单元
/* ss=1 bs1=5 bs2=3 位时间宽度为(1+5+3) 波特率即为时钟周期tq*(1+3+5) */
//CAN_InitStructure.CAN_BS1=CAN_BS1_5tq; //BTR-TS1 时间段1 占用了5个时间单元
//CAN_InitStructure.CAN_BS2=CAN_BS2_3tq; //BTR-TS1 时间段2 占用了3个时间单元
/* CAN Baudrate = 1 MBps (1MBps已为stm32的CAN最高速率) (CAN 时钟频率为 APB1 = 36 MHz) */
//CAN_InitStructure.CAN_Prescaler =4; ////BTR-BRP 波特率分频器 定义了时间单元的时间长度 36/(1+5+3)/4=1 Mbps
CAN_Init(CANx, &CAN_InitStructure);
}
/*
* 函数名:CAN_Filter_Config
* 描述 :CAN的过滤器 配置
* 输入 :无
* 输出 : 无
* 调用 :内部调用
*/
static void CAN_Filter_Config(void)
{
CAN_FilterInitTypeDef CAN_FilterInitStructure;
/*CAN筛选器初始化*/
CAN_FilterInitStructure.CAN_FilterNumber=0; //筛选器组0
CAN_FilterInitStructure.CAN_FilterMode=CAN_FilterMode_IdMask; //工作在掩码模式
CAN_FilterInitStructure.CAN_FilterScale=CAN_FilterScale_32bit; //筛选器位宽为单个32位。
/* 使能筛选器,按照标志的内容进行比对筛选,扩展ID不是如下的就抛弃掉,是的话,会存入FIFO0。 */
CAN_FilterInitStructure.CAN_FilterIdHigh= ((((u32)0x1314<<3)|CAN_ID_EXT|CAN_RTR_DATA)&0xFFFF0000)>>16; //要筛选的ID高位
CAN_FilterInitStructure.CAN_FilterIdLow= (((u32)0x1314<<3)|CAN_ID_EXT|CAN_RTR_DATA)&0xFFFF; //要筛选的ID低位
CAN_FilterInitStructure.CAN_FilterMaskIdHigh= 0xFFFF; //筛选器高16位每位必须匹配
CAN_FilterInitStructure.CAN_FilterMaskIdLow= 0xFFFF; //0xFFFF筛选器低16位每位必须匹配
CAN_FilterInitStructure.CAN_FilterFIFOAssignment=CAN_Filter_FIFO0 ; //筛选器被关联到FIFO0
CAN_FilterInitStructure.CAN_FilterActivation=ENABLE; //使能筛选器
CAN_FilterInit(&CAN_FilterInitStructure);
/*CAN通信中断使能*/
CAN_ITConfig(CANx, CAN_IT_FMP0, ENABLE);
}
/*
* 函数名:CAN_Config
* 描述 :完整配置CAN的功能
* 输入 :无
* 输出 : 无
* 调用 :外部调用
*/
void CAN_Config(void)
{
CAN_GPIO_Config();
CAN_NVIC_Config();
CAN_Mode_Config();
CAN_Filter_Config();
}
/**
* @brief 初始化 Rx Message数据结构体
* @param RxMessage: 指向要初始化的数据结构体
* @retval None
*/
void Init_RxMes(CanRxMsg *RxMessage)
{
uint8_t ubCounter = 0;
/*把接收结构体清零*/
RxMessage->StdId = 0x00;
RxMessage->ExtId = 0x00;
RxMessage->IDE = CAN_ID_STD;
RxMessage->DLC = 0;
RxMessage->FMI = 0;
for (ubCounter = 0; ubCounter < 8; ubCounter++)
{
RxMessage->Data[ubCounter] = 0x00;
}
}
/*
* 函数名:CAN_SetMsg
* 描述 :CAN通信报文内容设置,设置一个数据内容为0-7的数据包
* 输入 :发送报文结构体
* 输出 : 无
* 调用 :外部调用
*/
void CAN_SetMsg(CanTxMsg *TxMessage,double T1,double H1)
{
//TxMessage.StdId=0x00;
TxMessage->ExtId=0x1314; //使用的扩展ID
TxMessage->IDE=CAN_ID_EXT; //扩展模式
TxMessage->RTR=CAN_RTR_DATA; //发送的是数据
TxMessage->DLC=2; //数据长度为8字节
TxMessage->Data[0] = T1;
TxMessage->Data[1] = H1;
}
/**************************END OF FILE************************************/main.c
/**
******************************************************************************
* main.c
* CAN通讯实验温湿度端
******************************************************************************
*/
#include "stm32f10x.h"
#include "./usart/bsp_usart.h"
#include "./can/bsp_can.h"
#include "./oled/oled.h"
#include "./delay/delay.h"
#include "./bsp_i2c/bsp_i2c.h"
//函数声明
void GPIO_Configuration(void);
uint8_t t;
uint8_t len;
uint16_t times=0;
extern uint32_t T1;
extern uint32_t H1;
__IO uint32_t flag = 0; //用于标志是否接收到数据,在中断函数中赋值
CanTxMsg TxMessage; //发送缓冲区
CanRxMsg RxMessage; //接收缓冲区
/*
* 函数名:main
* 描述 :主函数
* 输入 :无
* 输出 :无
*/
int main(void)
{
float t=0;
double T;
double H;
vu8 key=0;//定义键值
double ShowBuff[8]={0};
double ShowBuff1[8]={0};
GPIO_Configuration();//pc13灯 初始化
delay_ms(500);
/* 配置串口为:115200 8-N-1 */
USART_Config(); //不可去掉否则不能正常工作
IIC_Init();
CAN_Config();
PCout(13)=0;
while(1)
{
read_AHT10_once();
T=T1/10.0;
H=H1/10.0;
ShowBuff[0] = T + '0';
ShowBuff1[0] = H + '0';
CAN_SetMsg(&TxMessage,ShowBuff[0],ShowBuff1[0]);
CAN_Transmit(CANx, &TxMessage);
delay_ms(3000);
}
}
void GPIO_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOC , ENABLE);
//=============================================================================
//LED -> PC13
//=============================================================================
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init(GPIOC, &GPIO_InitStructure);
}
显示屏端
can.c和bsp_can.c是一样的就不复述了
oled.c
你需要根据你的显示屏自己设置,问你的商家要oled代码就可以了,道理是一样的,当然用法也是
mian.c
/**
******************************************************************************
* main.c
* CAN通讯实验显示屏端
******************************************************************************
*/
#include "stm32f10x.h"
#include "./usart/bsp_usart.h"
#include "GPIOLIKE51.h"
#include "./can/bsp_can.h"
#include "./oled/oled.h"
#include "./delay/delay.h"
//函数声明
void GPIO_Configuration(void);
uint8_t t;
uint8_t len;
uint16_t times=0;
__IO uint32_t flag = 0; //用于标志是否接收到数据,在中断函数中赋值
CanTxMsg TxMessage; //发送缓冲区
CanRxMsg RxMessage; //接收缓冲区
/*
* 函数名:main
* 描述 :主函数
* 输入 :无
* 输出 :无
*/
int main(void)
{
char ShowBuff[8]={0};
OLED_Init();//初始化OLED
OLED_Clear();//清屏
GPIO_Configuration();//pc13灯 初始化
delay_ms(500);
/* 配置串口为:115200 8-N-1 */
USART_Config(); //不可去掉否则不能正常工作
IIC_Init();
CAN_Config();
PCout(13)=0;
while(1)
{
//OLED_Clear();
ShowBuff[0] = RxMessage.Data[0];
ShowBuff[1] = RxMessage.Data[1];
OLED_ShowCHinese(24,0,0);
OLED_ShowCHinese(45,0,1);
OLED_ShowCHinese(65,0,2);
OLED_ShowString(0,3,"Temp");
OLED_ShowNum(35,3,ShowBuff[0]+'2',4);
OLED_ShowString(75,3,"*C");
OLED_ShowString(0,5,"Humi");
OLED_ShowNum(35,5,ShowBuff[1]+'2',4);
OLED_ShowString(75,5,"%");
delay_ms(500);
}
}
void GPIO_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOC , ENABLE);
//=============================================================================
//LED -> PC13
//=============================================================================
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init(GPIOC, &GPIO_InitStructure);
}
总结
其实也真的没有什么的,需要源码的话可以给我写邮件17630925326@163.com,当然留言也可以
成品是这样的
我很可爱,请我喝冰可乐



- Post link: https://dy1320.top/2021/12/04/can/
- Copyright Notice: All articles in this blog are licensed under unless otherwise stated.
GitHub Issues