电子器件测试方法总结
P45浮球开关测试
浮球液位开关
浮球液位开关是一种结构简单,使用方便的液位控制器件,它不需要提供电源,没有复杂电路,它具有比一般机械开关体积小,工作寿命长等优点。造型里只要材质选用正确,和任何性质液体或压力,温度皆可使用,其在造船工业、发电机设备、石油化工、食品工业、水处理设备、染整工业、油压机械等方面都得到广泛应用。
工作原理
液位传感器主要由有磁簧开关和浮球组成,浮球内有磁性材料,在密闭的非导磁金属管或塑料管内设置一个或多个磁簧开关,然后将导管穿过一个或多个带有磁性材料的浮球,并利用固定双环控制浮球与磁簧开关在相关位置上,浮球随着液体上升或下降,利用球内靠近磁簧开关的接点,产生开与关的动作,作液位控制或指示(当浮球靠近磁簧开关是导通;离开时开关断开)。
- 触点容量:10W6. 阻性负载:107回
- 开关电压:AC/DC 0
110V 工作温度:-1060°C - 开关电流:0.5A 工作压力:<0.6MPA
- 绝缘电阻:>10Ω9. 介质比重:>0.6
- 触点阻抗:<100mΩ 10. 开关材料:PP

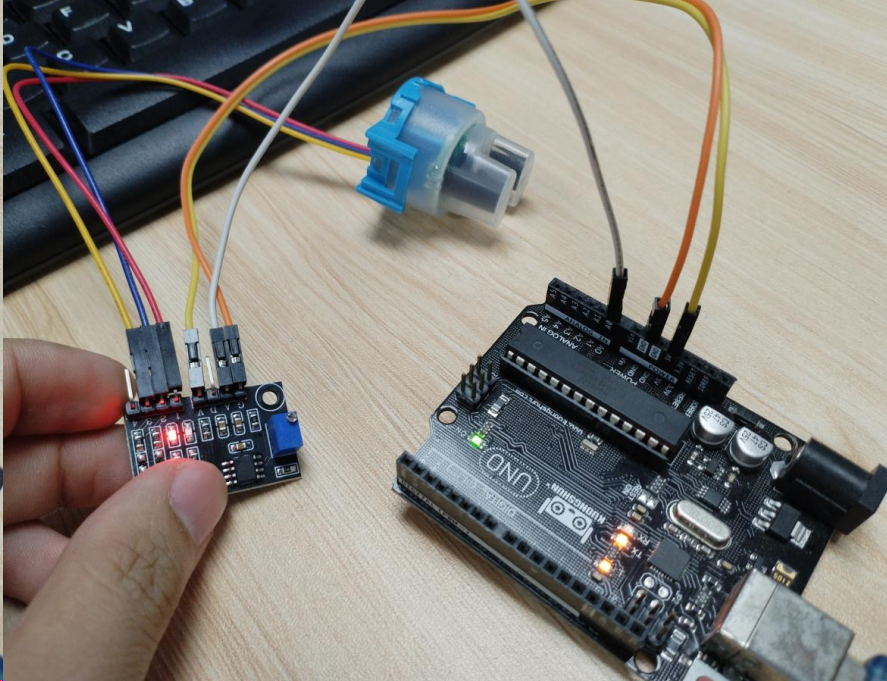
测试方法
- 给两条线提供3V的电压,串联一个LED灯。
- 上下晃动浮球开关,观察LED是否能够正常点亮和熄灭。
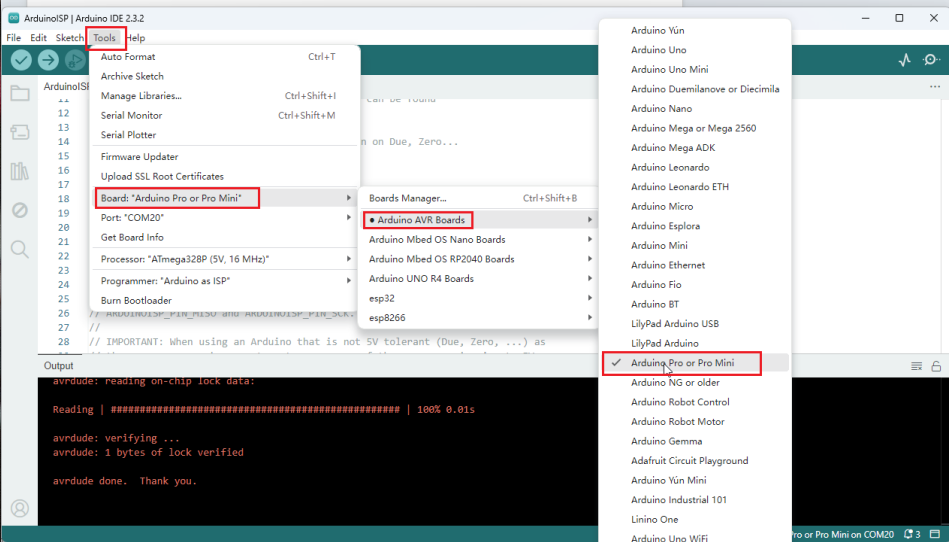
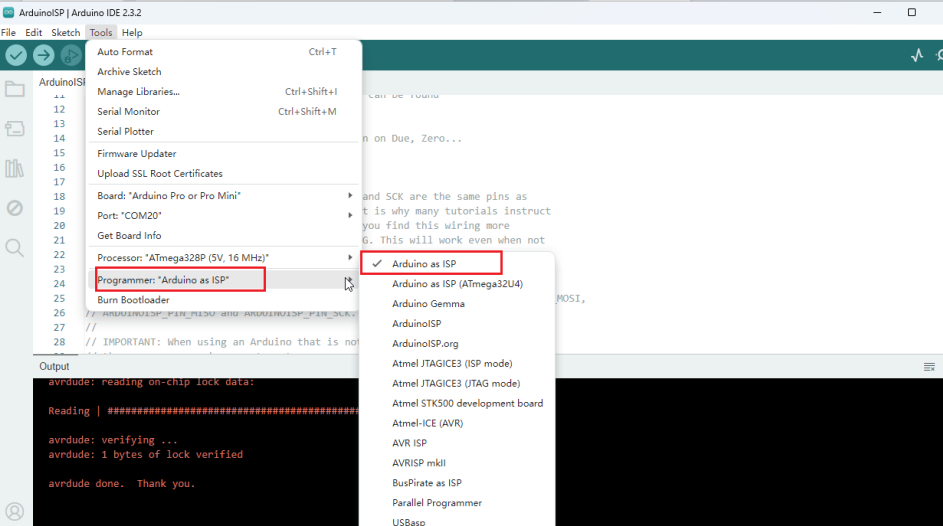
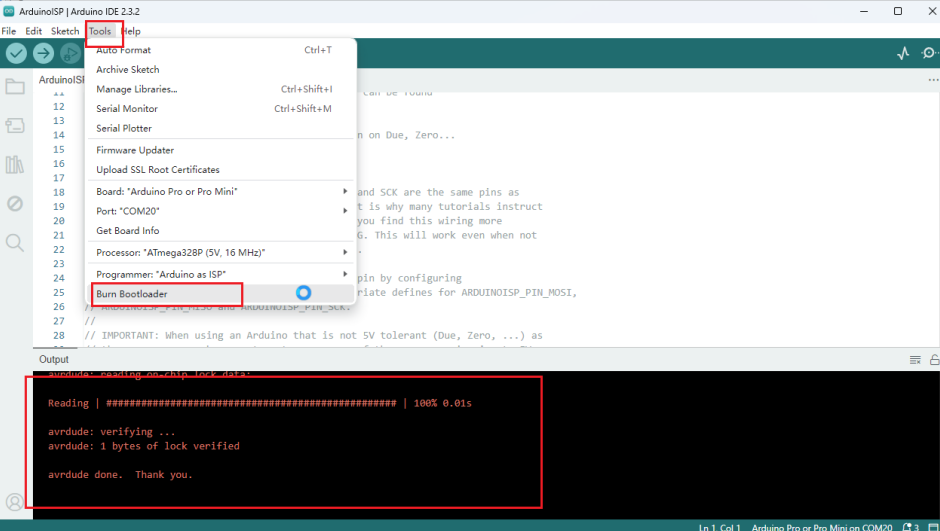
Arduino烧写bootloader
给Uno板(A板)烧录ISP固件
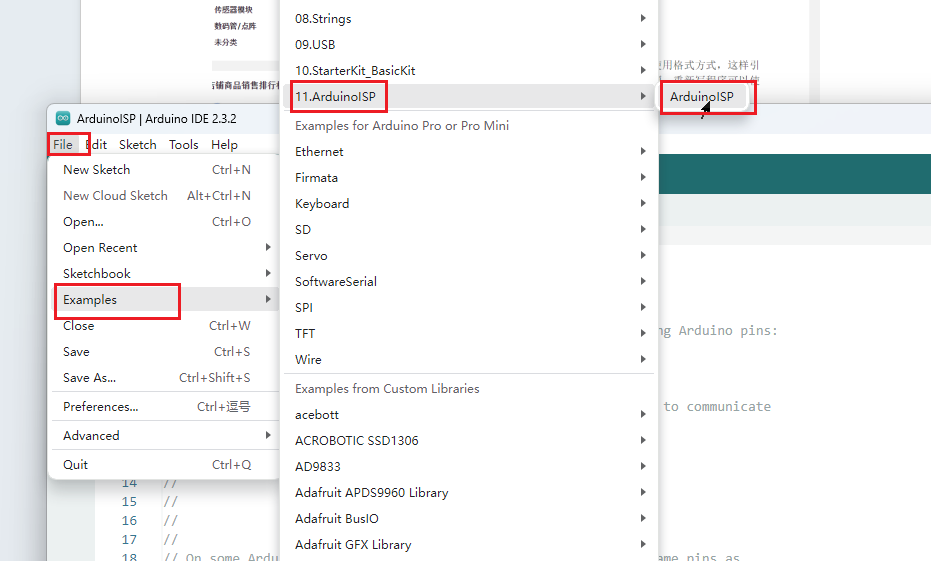
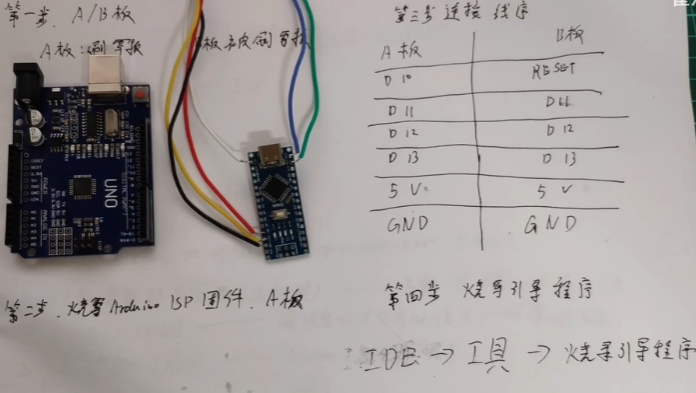
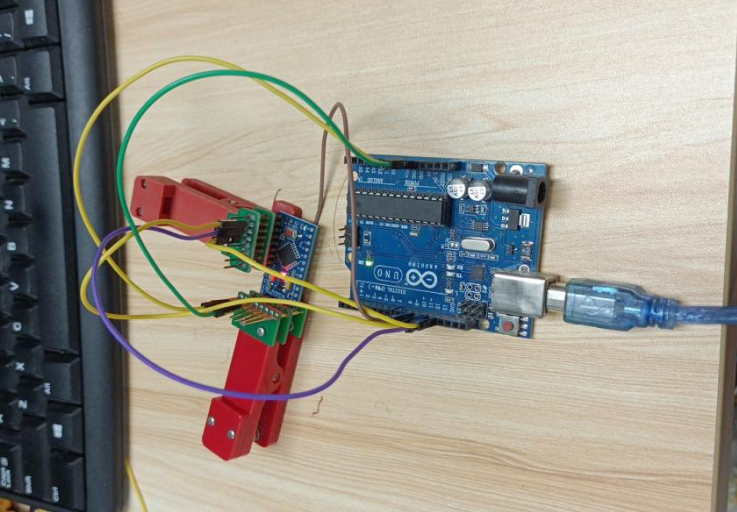
烧写bootloader
AH016数字功放板模块测试

模块信息
35W单声道数字功放模块
工作电压:10~30VDC
推荐使用24V电压输出2A电源
推荐音箱阻抗:8欧姆佳(4欧姆6欧姆也可以用)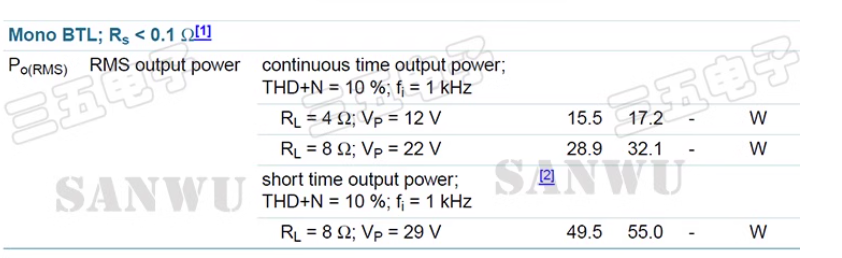
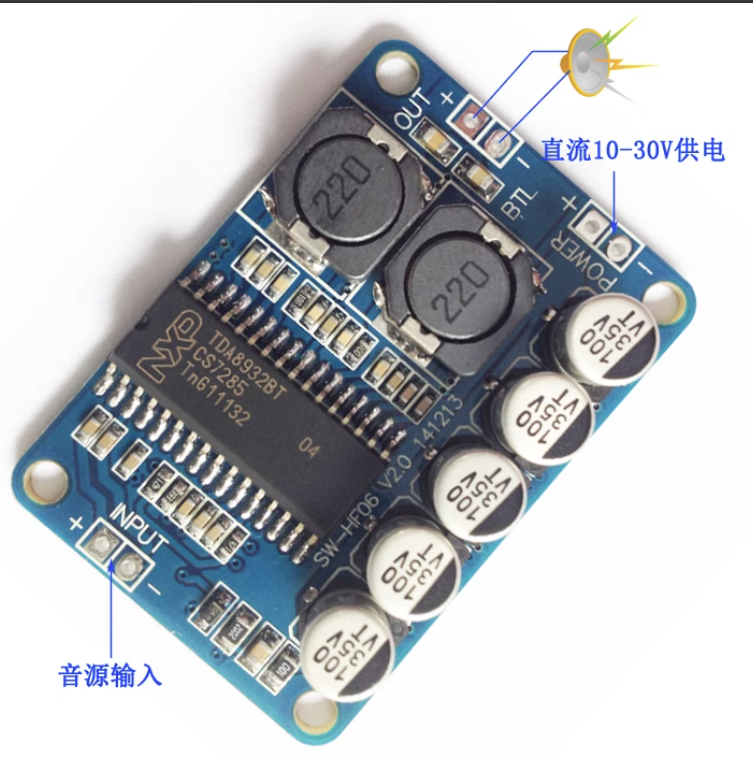
- 35W单声道功放模块
- 大功率低功耗TDA8932
测试方法
- 第一次测试
- 使用8Ω 0.8W的小喇叭,杜邦线连接电源,杜邦线因电流过大软化烧毁。
- 杜邦线最大承受电流为1A。
- 正确测试方法
- 使用35W以上喇叭。
- 直接焊接电源引脚,不使用杜邦线。
- 使用100W大喇叭进行测试。
VHM-314蓝牙5.0 MP3解码板测试
- 音频线说明
- 蓝色:负极
- 绿色:左声道音频信号输入线
- 红色:右声道音频信号输入线
- 测试方法
- 连接蓝牙进行测试,蓝牙名称:
XFW-BT
- 连接蓝牙进行测试,蓝牙名称:
18650电池容量测试
检测18650电池时,电压的变化范围是一个重要的指标,它可以帮助我们判断电池的充放电状态以及电池的性能。关于18650电池的电压变化,可以从以下几个方面来阐述:
一、电压范围
标称电压:18650锂电池的标称电压通常为3.6V或3.7V,这是电池在正常工作时的典型电压。
充电电压:在充电过程中,电池的电压会逐渐上升,直至达到充电终止电压,一般为4.2V左右。这意味着当电池的空载电压充到4.2V时,电池基本充满。
放电电压:在放电过程中,电池的电压会逐渐下降。根据行业标准,18650锂电池的放电终止电压通常为2.5V3.0V,这意味着当电池电压降至这个范围时,应停止使用,以避免过度放电对电池寿命和性能造成损害。3.0V),应停止放电以避免电池损坏。
二、电压变化过程
充电过程:电池从空载状态开始充电,电压从较低值逐渐上升,直到达到充电终止电压(约为4.2V)。充电过程中,电压的变化是连续的,且通常呈现线性或近似线性的增长趋势。
放电过程:电池从满电状态开始放电,电压从较高值逐渐下降。在放电初期,电压下降较为缓慢;随着放电的进行,电压下降速度逐渐加快;当电池电压降至放电终止电压时(通常为2.5V
三、电压检测的意义
通过检测18650电池的电压变化,我们可以了解电池的充放电状态、估算电池的剩余电量以及判断电池的性能。此外,还可以通过监测电池在充放电过程中的电压变化来发现电池是否存在故障或性能下降等问题。
综上所述,检测18650电池时,需要关注其电压从充电时的4.2V左右逐渐下降到放电终止电压(2.5V~3.0V)的过程。这一过程中电压的变化可以为我们提供关于电池状态的重要信息。
电压范围
- 标称电压:3.6V / 3.7V
- 充电电压:最高4.2V
- 放电电压:终止电压为2.5V ~ 3.0V
测试方法

- 监测充放电过程中的电压变化。
GY-SHT30-D数字温湿度传感器模块测试
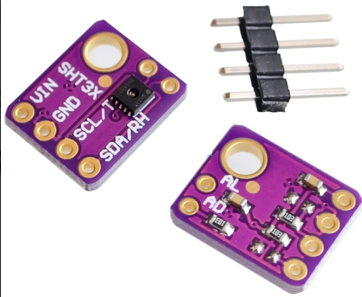
Arduino接线
| 模块 | Arduino |
|---|---|
| Vin | 3.3V |
| GND | GND |
| SCL | A5 (SCL) |
| SDA | A4 (SDA) |
注意
- 需要将库资源 (
.c和.h文件) 放入同名文件夹,并导入 Arduino IDE。
以下是您提供的文档内容转换成的Markdown格式文本,图片地址已按要求设置:
W3230高精度温度控制器数显温控器模块控温开关微型12V24V/AC220V
VCC和GND接好线,测试温度超过阈值是否接通,低于阈值是否断开(注意会有回差值)

AD9833
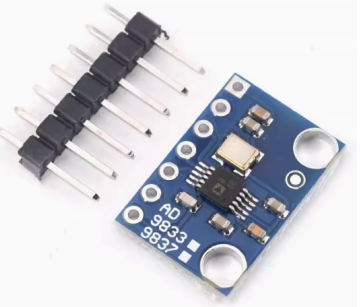

测试方法:
接线
| UNO | AD9833 |
|---|---|
| 9 | FSYNC |
| 10 | SCLK |
| 11 | SDATA |
| A0 | OUT |
| GND | DGND |
| 3.3V | VCC |
参考
#include <MD_AD9833.h>
#include <SPI.h>
#define cbi(sfr, bit) (_SFR_BYTE(sfr) &= ~_BV(bit))
#define sbi(sfr, bit) (_SFR_BYTE(sfr) |= _BV(bit))
int i;
int ch0_adc[600];
MD_AD9833 AD(/*DATA*/11, /*CLK*/10, /*FSYNC*/9);
void setup(void)
{
Serial.begin(2000000);
sbi(ADCSRA,ADPS2) ;
cbi(ADCSRA,ADPS1) ;
cbi(ADCSRA,ADPS0) ;
pinMode(7, OUTPUT); digitalWrite(7, HIGH); // 数字引脚供电(仅限极低低功耗模块)
pinMode(6, OUTPUT); digitalWrite(6, LOW);
AD.begin();
AD.setMode(MD_AD9833::MODE_TRIANGLE); // MODE_SINE MODE_TRIANGLE MODE_SQUARE1
AD.setFrequency(MD_AD9833::CHAN_0, 1000000);
}
void loop(void)
{
for ( i = 0 ; i < 600 ; i++){ ch0_adc[i] = analogRead(A0); }
for ( i = 0 ; i < 600 ; i++){ Serial.println(ch0_adc[i]); }
delay(1000); // 单位 毫秒
}Arduino出现波形
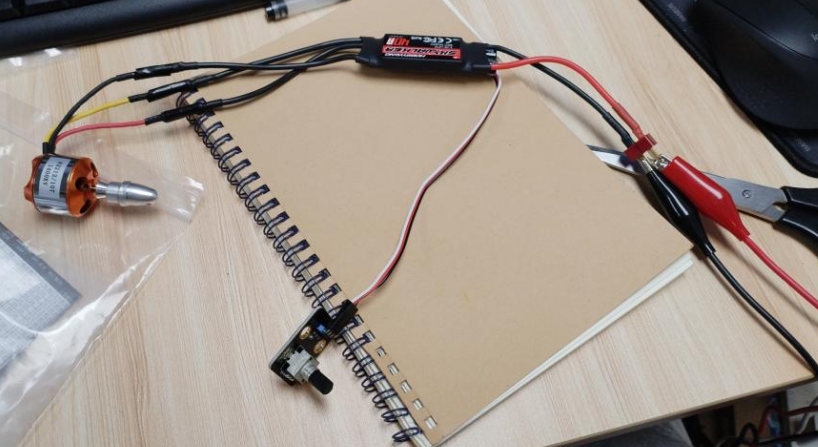
天行者40A 无刷电调 焊好香蕉头+T插

测试方法
提供一个12V电压,连接一个三相电机,并且接一个控制器(可用电位器)
黑色 XG-07C
DC5V 1.5A 小型储物柜电磁锁 四线带反馈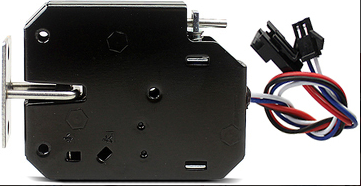
测试方法:
外加一个12V的电压,锁扣弹出,按下尾巴的杆也能弹出
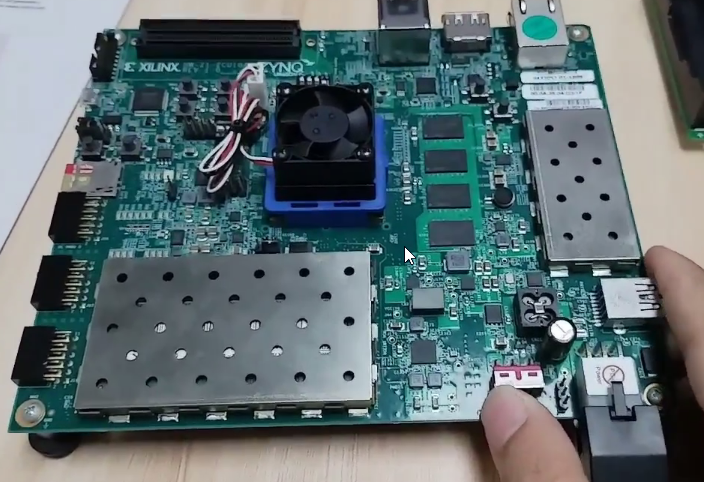
开发板评估套件EK-U1-ZCU104-G编程Xilinx Zynq赛灵思ZCU104-G-ED
上电是否正常工作
连接电源灯光亮起,风扇转动,正常工作
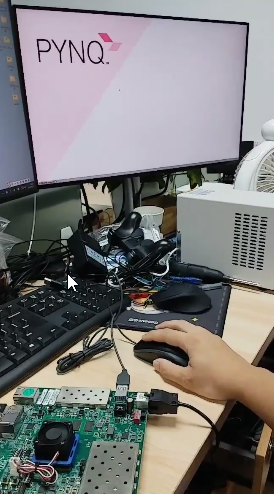
测试HDMI连接屏幕
网络连通测试
Ping www.baidu.com
SD卡挂载读取
确定SD卡设备名lsblk
信息讲解
lsblk命令主要用于列出所有可用的存储设备及其挂载点信息。以下是lsblk查询到的信息的一些讲解:
设备名称和编号:
mmcblk0:这是主要的存储设备名称,通常代表一个SD卡或MMC卡。
mmcblk0p1、mmcblk0p2:这些是mmcblk0的分区,p1和p2分别代表第一个和第二个分区。
大小:
14.8G:这是mmcblk0的总大小,表示该存储设备有14.8GB的容量。
130M、14.7G:这是mmcblk0p1和mmcblk0p2分区的大小。
类型:
disk:表示这是一个磁盘设备。
挂载点:
/boot:这是mmcblk0p1分区的挂载点,通常用于存放启动文件。
/:虽然图片中未直接显示,但通常根目录(/)会挂载到一个较大的分区上,如mmcblk0p2,用于存放系统文件和用户数据。
2)创建挂载点
sudo mkdir -p /mnt/sdcard3)挂载SD卡
sudo mount /dev/mmcblk0p2 /mnt/sdcard以下为参考
如果是第一次使用需要先创建挂载点,即一个空目录。要将SD卡挂载到Linux系统上,你需要首先确保SD卡已经被系统识别,并且你知道它的设备名称(比如/dev/mmcblk0或者/dev/sdb等)。接着,你可以按照以下步骤来挂载SD卡:
创建挂载点:首先,你需要一个挂载点,即一个空目录,用于挂载SD卡。通常,人们会在/mnt目录下创建这个挂载点,但你可以在任何地方创建它。例如,创建一个名为/mnt/sdcard的目录:
sudo mkdir -p /mnt/sdcard-p参数的作用是如果上级目录不存在,则一并创建。
挂载SD卡:接下来,使用mount命令将SD卡挂载到刚才创建的挂载点上。你需要知道SD卡的设备名称以及分区号(如果SD卡被分为了多个分区)。假设SD卡的设备名称是/dev/mmcblk0,并且你想要挂载的是第一个分区(/dev/mmcblk0p1),你可以这样做:
sudo mount /dev/mmcblk0p1 /mnt/sdcard如果SD卡没有被分区,或者你想要挂载整个SD卡设备,你可以尝试直接挂载设备名称(但这通常不推荐,因为SD卡可能包含多个分区,并且直接挂载设备可能会导致数据丢失或损坏):
sudo mount /dev/mmcblk0 /mnt/sdcard但请注意,直接挂载整个设备而不是指定分区通常不是最佳实践,除非你确定SD卡没有被分区。
检查挂载:挂载完成后,你可以使用df -h命令来检查挂载情况,或者使用ls /mnt/sdcard来查看挂载点下的内容。
自动挂载:如果你希望每次启动系统时都能自动挂载SD卡,你需要编辑/etc/fstab文件,并添加一行来指定挂载选项。但请注意,在编辑/etc/fstab之前,请确保你完全理解你正在做什么,因为错误的配置可能会导致系统无法启动。
卸载SD卡:当你完成SD卡的使用后,可以使用umount命令来卸载它:
sudo umount /mnt/sdcard在卸载之前,请确保没有任何进程正在使用SD卡上的文件。你可以使用lsoft命令来查找可能正在使用SD卡的进程。
访问SD卡内容
cd /mnt/sdcard
ls卸载SD卡(保护SD卡)
sudo umount /mnt/sdcard资料参考
当在Linux系统中卸载SD卡失败时,可以采取以下步骤来解决问题:
- 检查当前目录
首先,确认你是否在SD卡的挂载目录下尝试卸载。如果是,请切换到其他目录,因为尝试在挂载点下卸载设备通常会导致“设备或资源正忙”的错误。
- 查看并结束使用SD卡的进程
使用以下命令来查看哪些进程正在使用SD卡:
lsof /mnt/sdXX(请将sdXX替换为你的SD卡挂载点)或者,如果你不确定挂载点,可以使用mount命令查看所有挂载点,然后相应地替换。
如果发现有进程正在使用SD卡,你可以使用kill命令结束这些进程。但请小心,结束进程可能会导致数据丢失或程序异常。
- 使用umount命令
在确认没有进程使用SD卡后,再次尝试使用umount命令卸载SD卡。确保使用正确的设备路径或挂载点。例如:
sudo umount /mnt/sdXX或者,如果你知道设备的设备文件(如/dev/sdb1),也可以使用:
sudo umount /dev/sdb1- 尝试强制卸载
如果普通卸载命令失败,可以尝试使用-l(或–lazy)选项来强制卸载。这个选项会延迟卸载操作,直到设备不再被使用。
sudo umount -l /mnt/sdXX或者:
sudo umount -l /dev/sdb1- 检查挂载点配置
确认/etc/fstab或系统的自动挂载脚本中是否有关于SD卡的配置,这可能会阻止你手动卸载SD卡。
- 重启系统
如果上述方法都不奏效,且SD卡不再需要,考虑重启系统。重启后,系统应该能够正确地处理SD卡的挂载和卸载。
- 检查硬件和驱动程序
如果问题持续存在,可能需要检查SD卡读卡器或SD卡本身的硬件问题,以及Linux系统是否支持该设备的驱动程序。
- 查阅文档和社区
最后,查阅Linux发行版的官方文档或社区论坛,看看是否有其他用户遇到并解决了类似的问题。
通过以上步骤,你应该能够解决Linux系统中卸载SD卡失败的问题。如果问题仍然存在,可能需要更深入地调查系统配置或硬件问题。
自动挂载SD卡(未试过)
在Linux系统中设置自动挂载SD卡,可以通过多种方法实现,其中比较常用的方法是编辑/etc/fstab文件或使用udev规则。以下是详细的步骤:
方法一:编辑/etc/fstab文件
确定SD卡设备名称:
插入SD卡到Linux系统的SD卡读卡器中。
打开终端,使用lsblk命令来查看系统中的磁盘和分区信息。SD卡通常以/dev/sdX(X为字母)的形式出现,并且分区可能会显示为/dev/sdX1、/dev/sdX2等。
创建挂载点:
在终端中,使用sudo mkdir /mnt/sdcard(或你选择的任何目录)命令创建一个目录作为SD卡的挂载点。
编辑/etc/fstab文件:
使用文本编辑器(如nano或vi)打开/etc/fstab文件。例如,使用sudo nano /etc/fstab命令。
在文件末尾添加一行,类似于/dev/sdX1 /mnt/sdcard auto defaults 0 0(其中/dev/sdX1是你的SD卡分区设备名,/mnt/sdcard是挂载点)。注意,根据你的SD卡文件系统类型(如vfat、ext4等),你可能需要将auto替换为具体的文件系统类型。
保存并退出编辑器。
测试挂载:
使用mount -a命令来测试自动挂载是否成功。如果没有错误消息且SD卡已挂载到指定目录,则表示设置成功。
方法二:使用udev规则
确定SD卡设备名称:
这一步与编辑/etc/fstab方法中的步骤相同。
创建udev规则文件:
使用sudo nano /etc/udev/rules.d/99-automount-sdcard.rules命令创建一个新的udev规则文件。
在文件中添加如下规则(根据你的需求调整挂载点):
KERNEL=="sd[b-z]", SUBSYSTEM=="block", ACTION=="add", RUN+="/bin/mount /dev/%k /mnt/sdcard"
KERNEL=="sd[b-z]", SUBSYSTEM=="block", ACTION=="remove", RUN+="/bin/umount /mnt/sdcard"注意:这里的/mnt/sdcard是挂载点,你可以根据需要更改它。%k会被替换为实际的设备文件名(如/dev/sdb)。
重新加载udev规则:
使用sudo udevadm control --reload-rules命令重新加载udev规则。
插入SD卡:
将SD卡插入计算机,udev规则会自动触发挂载操作。
检查挂载状态:
使用df -h命令查看挂载的文件系统列表,确认SD卡是否已成功挂载到指定目录。
通过以上任一方法,你都可以在Linux系统中实现SD卡的自动挂载。请根据自己的需求和系统环境选择合适的方法。
自动卸载SD卡(未试过)
在Linux系统中设置自动卸载SD卡,通常并不直接通过一个简单的配置来实现自动卸载,因为卸载操作通常发生在用户决定移除SD卡之前,并且需要确保SD卡上的数据不再被系统使用。不过,可以通过一些脚本和udev规则来辅助这一过程,确保在SD卡被移除前执行卸载操作。
以下是一些设置自动卸载SD卡的建议步骤:
- 使用udev规则触发卸载脚本
udev是Linux内核的设备管理器,它可以在设备被添加或移除时触发特定的脚本。你可以创建一个udev规则来检测SD卡的移除事件,并运行一个脚本来卸载SD卡。
编写卸载脚本:
首先,编写一个脚本来处理卸载操作。这个脚本会检查SD卡是否已挂载,并尝试卸载它。例如,创建一个名为/etc/udev/scripts/unmount_sdcard.sh的脚本:
#!/bin/bash
MOUNT_POINT="/mnt/sdcard" # SD卡的挂载点
if mount | grep -q "$MOUNT_POINT"; then
umount "$MOUNT_POINT"
echo "SD card unmounted from $MOUNT_POINT"
else
echo "SD card not mounted at $MOUNT_POINT"
fi确保该脚本具有执行权限:
sudo chmod +x /etc/udev/scripts/unmount_sdcard.sh创建udev规则:
在/etc/udev/rules.d/目录下创建一个新的udev规则文件,如99-unmount-sdcard.rules,并添加以下内容来触发脚本:
ACTION=="remove", SUBSYSTEM=="block", ENV{ID_FS_TYPE}=="vfat|ext4|...", RUN+="/etc/udev/scripts/unmount_sdcard.sh"注意:你需要将vfat|ext4|...替换为你的SD卡可能使用的文件系统类型,用|分隔。
重新加载udev规则:
使用以下命令重新加载udev规则,使更改生效:
sudo udevadm control --reload-rules
sudo udevadm trigger- 注意事项
数据完整性:在卸载SD卡之前,请确保所有写入操作已完成,以避免数据丢失。
多用户环境:在多用户环境中,需要确保卸载操作不会干扰其他用户的活动。
错误处理:在卸载脚本中添加适当的错误处理逻辑,以处理无法卸载的情况(例如,SD卡正在被使用)。
安全性:确保udev规则和脚本具有适当的权限和安全性设置,以防止潜在的安全风险。
- 手动卸载
虽然自动卸载可以提高便利性,但在某些情况下,你可能仍然需要手动卸载SD卡。你可以使用umount命令来卸载SD卡,如:
sudo umount /mnt/sdcard如果设备正忙,你可以尝试使用-l选项来强制卸载(但请注意,这可能会导致数据丢失):
sudo umount -l /mnt/sdcard总之,虽然Linux没有直接提供自动卸载SD卡的配置选项,但你可以通过udev规则和脚本来实现类似的功能。请注意,在尝试卸载SD卡之前,始终确保数据的安全性。
Linux关机指令
Linux关机指令主要有以下几种:
shutdown:最常用的关机命令。可以指定时间后关机,也可以立即关机。例如,shutdown -h now表示立即关机,shutdown +10表示10分钟后关机。
halt:用于关闭系统并停止所有进程,但不会执行关机过程中的清理工作,可能需要更长时间才能完成关机。
poweroff:用于关闭系统并立即切断电源,与halt命令类似,也不会执行关机过程中的清理工作。
reboot:用于重新启动系统,而不是关机。但在某些情况下,可以将其视为关机后再开机的过程。
请注意,使用这些命令时通常需要具有足够的权限,因此可能需要使用sudo或以root用户身份执行。此外,执行shutdown、halt、poweroff等关机命令时,系统会向所有用户发送通知,以便用户保存工作并做好关机准备。
总结:Linux关机指令主要包括shutdown、halt、poweroff和reboot,其中shutdown是最常用的关机命令。

STC-3008电脑数显智能双控电子温控器 双显双温控 可调温控仪开关
简单描述:这是一个双温控器
要注意是多少V的温控开关,这是一个接交流电的温控开关
长按上三秒可以调节断电阈值(测试时设为29),长按下三秒设置重启阈值(测试时设为31)
用手指捏住温度探头使温度上升到31度,out灯熄灭,松开让温度降到29以下out灯开启

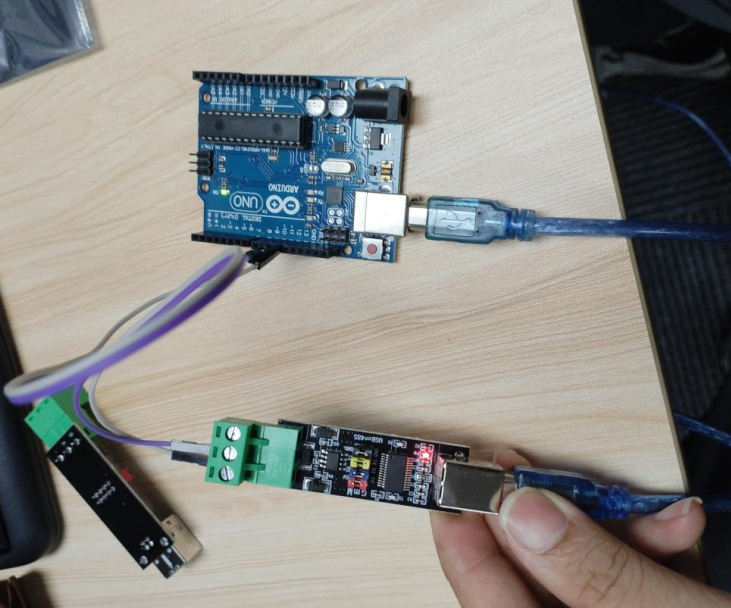
USB转485模块
方法一
两个互发
RS485测试
将USB TO RS232/485/TTL和目标板通过杜邦线,将A–>A和B–>B相连,在电脑端打开两个SSCOM串口调试助手,打开对应的端口号,设置相同的波特率,点击定时发送,可以正常收和发,如下图所示:
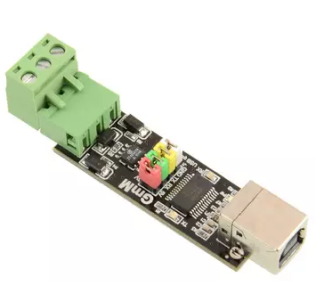

互相能发送时说明没问题
方法二
#include <SoftwareSerial.h>
// 定义485模块的接口引脚
#define RS485_RX 10// A
#define RS485_TX 11// B
// 创建软串口对象
SoftwareSerial rs485Serial(RS485_RX, RS485_TX);
void setup() {
// 初始化串口通信
Serial.begin(9600);
rs485Serial.begin(9600);
}
void loop() {
// 检查是否有数据从串口接收
if (Serial.available() > 0) {
// 从串口读取数据
String data = Serial.readStringUntil('\n');
// 通过485模块发送数据
rs485Serial.println(data);
Serial.print("Sent data: ");
Serial.println(data);
}
// 检查是否有数据从485模块接收
if (rs485Serial.available() > 0) {
// 从485模块读取数据
String data = rs485Serial.readStringUntil('\n');
// 通过串口输出接收的数据
Serial.print("Received data: ");
Serial.println(data);
}
delay(100); // 等待100毫秒
}
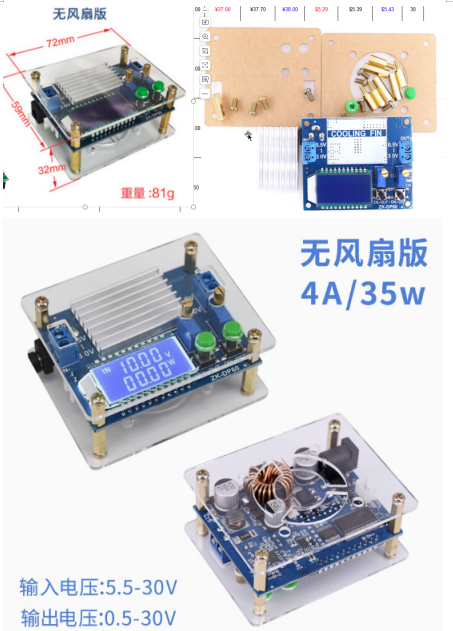
1800W 30A DC-DC大功率升压恒压恒流电源模块
(标准版,输入电流最大支持40A)
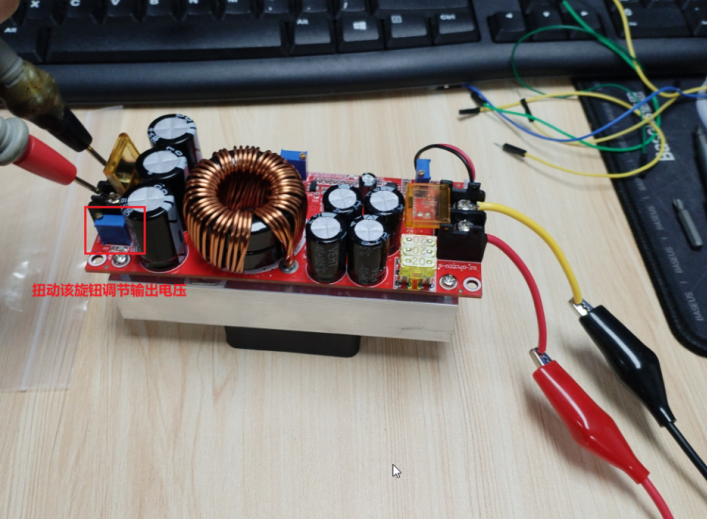
模块属性:非隔离升压模块(BOOST)
- 输入电压:8~60V
- 输入电流:20A
- 静态电流:15mA(12V输出20V,输出电压越高,电流越大会越平静)
- 输出电压:12~80V连续可调
- 输出电流:20A MAX超过15A,请增强散热(输入,输出压力相关,压力越大输出电流越小)
- 常数范围:0.5~20A
- 输出功率:输入电压*20A,如:输入12V *20A = 240W,输入24V *20A = 480W,输入36V *20A = 720W,输入48V *20A = 960W,输入60V *20A = 1200W
PD3.0/PPS/QC4+快充 手机充电模块(TYPE-C)
测试:
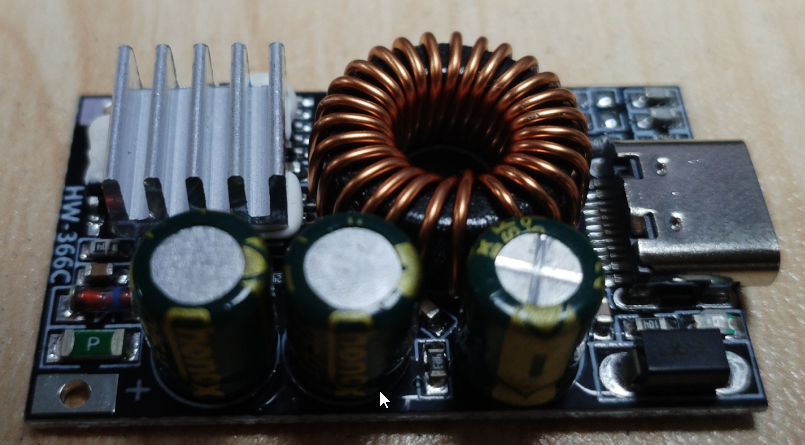
产品参数
- 输入电压:标准型5~32伏
- 输出电压:3~12伏(根据快充协议自动调整)
- 充电功率:额定18W,最大24W
- 本品支持以下快充协议:
- QC3.0:采用高通骁龙的安卓手机
- FCP:HW/荣耀9V2A快充
- Apple:苹果5V2.4A快充
- VIVO:支持9V2A双引擎闪充
- MTK_PE:采用联发科处理器的手机
- 尺寸:37.3mm*19.8mm
无线 433/868/915Mhz Lora Shield 信号稳定发射模块
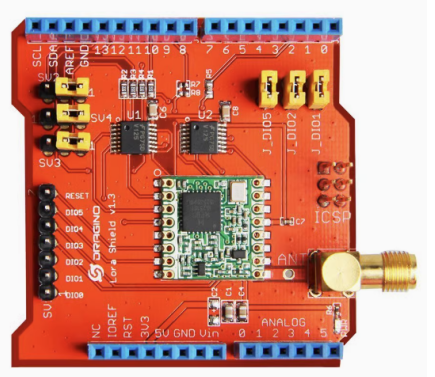
导入必要的库
你必须为每个 Arduino 上传每个程序。将有一个客户端和一个服务器。我们用来发送数据的客户端,服务器会接收到数据,然后给出回复。
在我们启动 arduino 程序之前,我们必须根据我们的 LORA 在库中编辑频率。在本例中,我使用 433Mhz。因此,我将打开 Radiohead 库并找到名为 RH_RF95.cpp 的文件。找到并将 setFrequency 函数编辑为 433.0
如果是其他频率要设置为相对应的频率
编辑后,保存文件。,您就可以打开 Arduino IDE。
这是客户端的代码:
#include <SPI.h>
#include <RH_RF95.h>
// Singleton instance of the radio driver
RH_RF95 rf95;
//RH_RF95 rf95(5, 2); // Rocket Scream Mini Ultra Pro with the RFM95W
//RH_RF95 rf95(8, 3); // Adafruit Feather M0 with RFM95
// Need this on Arduino Zero with SerialUSB port (eg RocketScream Mini Ultra Pro)
//#define Serial SerialUSB
void setup()
{
Serial.begin(9600);
while (!Serial) ; // Wait for serial port to be available
if (!rf95.init())
Serial.println("init failed");
// Defaults after init are 434.0MHz, 13dBm, Bw = 125 kHz, Cr = 4/5, Sf = 128chips/symbol, CRC on
// driver.setTxPower(14, true);
}
void loop()
{
Serial.println("Sending to rf95_server");
// Send a message to rf95_server
uint8_t data[] = "Hello I'm from lora!";
rf95.send(data, sizeof(data));
rf95.waitPacketSent();
// Now wait for a reply
uint8_t buf[RH_RF95_MAX_MESSAGE_LEN];
uint8_t len = sizeof(buf);
if (rf95.waitAvailableTimeout(3000))
{
// Should be a reply message for us now
if (rf95.recv(buf, &len))
{
Serial.print("got reply: ");
Serial.println((char*)buf);
}
else
{
Serial.println("recv failed");
}
}
else
{
Serial.println("No reply, is rf95_server running?");
}
delay(400);
}这是服务端的代码:
#include <SPI.h>
#include <RH_RF95.h>
// Singleton instance of the radio driver
RH_RF95 rf95;
//RH_RF95 rf95(5, 2); // Rocket Scream Mini Ultra Pro with the RFM95W
//RH_RF95 rf95(8, 3); // Adafruit Feather M0 with RFM95
// Need this on Arduino Zero with SerialUSB port (eg RocketScream Mini Ultra Pro)
//#define Serial SerialUSB
int led = 13;
void setup()
{
// Rocket Scream Mini Ultra Pro with the RFM95W only:
// Ensure serial flash is not interfering with radio communication on SPI bus
// pinMode(4, OUTPUT);
// digitalWrite(4, HIGH);
pinMode(led, OUTPUT);
Serial.begin(9600);
while (!Serial) ; // Wait for serial port to be available
if (!rf95.init())
Serial.println("init failed");
// Defaults after init are 434.0MHz, 13dBm, Bw = 125 kHz, Cr = 4/5, Sf = 128chips/symbol, CRC on
// The default transmitter power is 13dBm, using PA_BOOST.
// If you are using RFM95/96/97/98 modules which uses the PA_BOOST transmitter pin, then
// you can set transmitter powers from 5 to 23 dBm:
// driver.setTxPower(23, false);
// If you are using Modtronix inAir4 or inAir9,or any other module which uses the
// transmitter RFO pins and not the PA_BOOST pins
// then you can configure the power transmitter power for -1 to 14 dBm and with useRFO true.
// Failure to do that will result in extremely low transmit powers.
// driver.setTxPower(14, true);
}
void loop()
{
if (rf95.available())
{
// Should be a message for us now
uint8_t buf[RH_RF95_MAX_MESSAGE_LEN];
uint8_t len = sizeof(buf);
if (rf95.recv(buf, &len))
{
digitalWrite(led, HIGH);
// RH_RF95::printBuffer("request: ", buf, len);
Serial.print("got request: ");
Serial.println((char*)buf);
// Serial.print("RSSI: ");
// Serial.println(rf95.lastRssi(), DEC);
// Send a reply
uint8_t data[] = "And hello back to you";
rf95.send(data, sizeof(data));
rf95.waitPacketSent();
Serial.println("Sent a reply");
digitalWrite(led, LOW);
}
else
{
Serial.println("recv failed");
}
}
}水体浊度检测传感器 浊度值检测模块 液体悬浮颗粒污水水质测试板
放入水中测试浑浊度变化
DC056
航模电池
一、以上图方法测电压
二、用万用表接正负极测输出电压是否正常

10A15A20A30A直流二极管插头连接器太阳能光伏板并联抗回流保护器(太阳能连接器保险丝)
正常接没事,反接产生电流

DC降压电源模块9-120V100V96V84V72V24V宽压输入转12V 3A

这个是DE369
输入电压为16~120V
输出为12V
DE368
输入电压为DC9V—120V
输出为5.2V
dc-dc大功率升降压模块 12v转5V9V19V24V调节恒流恒压充电模块60W
转动CV旋钮调节电压,用万用表进行检测电压是否正常变化
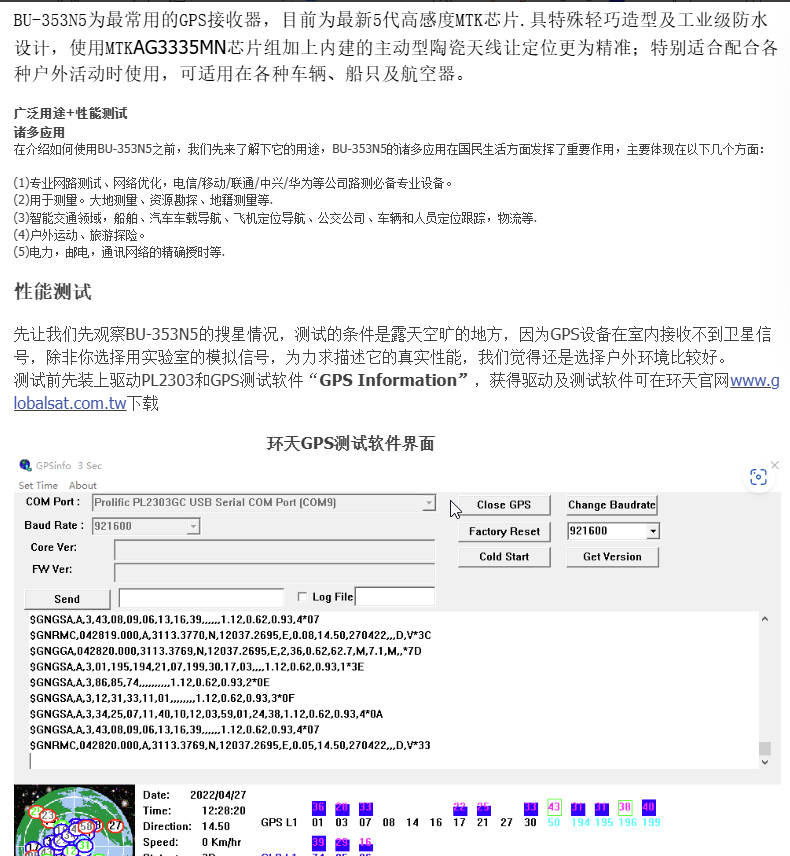
环天globalsat bu-353N5笔记本电脑gps接收器USB网优路测定位模块
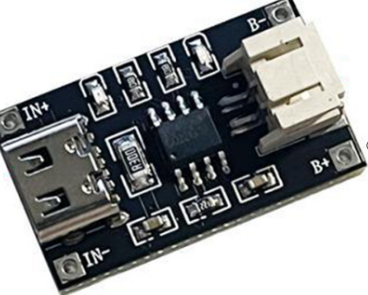
TP4056 3.7V锂电池充电模块 1A USB type-c接口PH2.0端
测输出电压
- 此模块用于 3.7v 聚合电池或 37v 聚合电池组
- 充电端口可以从 USB 取电
- 充电时红灯亮,满电时绿灯亮
- 充电时会发热,热度较高,有烫手感属正常现象
- 充电电流建议是电池容量的 0.37倍,比如 1000mA 的电池充电电流 400mA 左右就够了。当然,也可以用 1A 甚至 2A 的电流,只不过充完后的电池电池电压掉的比较多
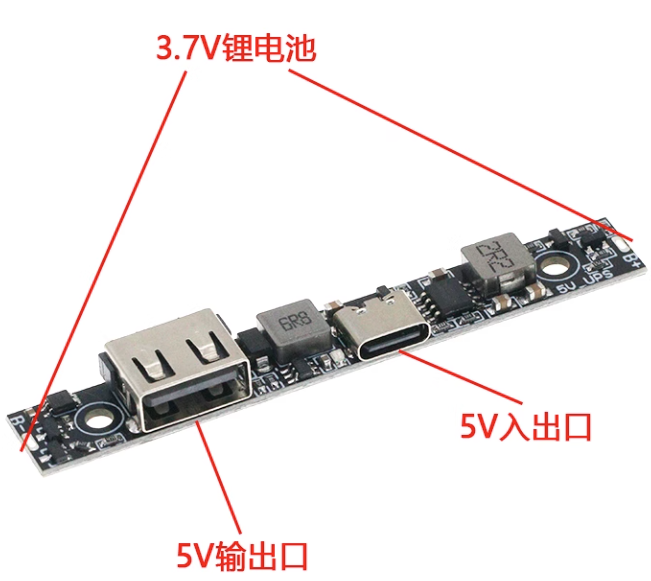
18650锂电池升压充电模块 DC5V UPS电源摄像头停电续航适配器自动
测输出电压是否为5V

CN3795 MPPT太阳能光伏充电模块
输入为6.5~24V
供电看电压是否提升

3D打印机电机 TMC2209驱动 256细分静音替换TMC2208 A4988 LV8729

默认电流:1.25A
最大电流:2.5A
逻辑电压:3.3V/5V
输入电压:5.5V-28V
微步:最高1/256模式:dir/step, uart
| MS3 | MS2 | MS1 | 细分 |
|---|---|---|---|
| GND | GND | GND | 1 |
| GND | GND | VCC | 2 |
| GND | VCC | GND | 4 |
| GND | VCC | VCC | 8 |
| VCC | GND | GND | 32 |
| VCC | GND | VCC | 64 |
| VCC | VCC | GND | 128 |
| VCC | VCC | VCC | 16 |
无刷电机
电调与无刷电机的线接好,不用考虑接线顺序,随便调转接的2根线就能实现正反转。
电调控制的黄色线接9号引脚
电调控制的黑色线接GND引脚
电调控制的黄色线接VCC引脚
电位器的信号线接A0引脚
电位器控制的GND线接GND引脚
电位器控制的VCC线接VCC引脚
这里可以使用面包板将电调和电位器的GND和VCC引脚和Aduino控制板的GND和5V引脚相连
ESP32-CAM
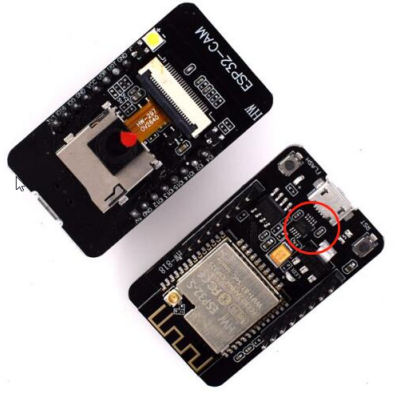
直接上传程序会报错
正确方式:
先按住flash键,接usb,松开按键,再点击程序上传

```
本文档记录了各类产品的测试方法及相关参数,后续可根据测试需求进行补充。



- Post link: https://dy1320.top/2025/02/19/ProductTesting/
- Copyright Notice: All articles in this blog are licensed under unless otherwise stated.
GitHub Issues